 Homepage
Homepage
TATA40 Matematiska utblickar: Program läsåret 2016/17
Varje utblick ingår i ett eller flera av följande tre teman, som framgår av programmet nedan:
- M: Matematisk breddning och/eller fördjupning.
- H: Matematikens historia.
- T: Matematikens användning inom teknik och naturvetenskap.
Fö 1: torsdag 22 sept 2016 kl. 10–12, sal C4
Hans Lundmark, MAI
Permutationer, symmetri och gruppteori [M]
En permutation av N stycken objekt (t.ex. talen 1 till N) är en uppräkning av dessa objekt i någon viss ordning. Exempelvis finns det 24 stycken permutationer av talen 1 till 4:
1234, 1243, 1324, 1342, …, 4312, 4321.
Alternativt kan man säga att en permutation är själva operationen att kasta om ordningen på objekten, så att t.ex. operationen ”byt plats på objekt nummer 2 och 4” är en permutation, liksom den triviala operationen ”låt alla element stå kvar i den ordning de står”. Fördelen med det senare synsättet är att det öppnar möjligheten att kombinera två permutationer och få en ny: utför först den ena omkastningen, därefter den andra, och se vad den sammanlagda effekten blir.
En symmetri hos ett geometriskt objekt är en geometrisk operation som inte ändrar objektets utseende; om man t.ex. vrider en liksidig triangel 120 grader kring dess mittpunkt så får man en triangel som är identisk med den ursprungliga. Ifall man utför två symmetrioperationer efter varandra får man en ny symmetrioperation, så även symmetrier kan kombineras.
Mängden av permutationer av N objekt och mängden av symmetrier för en given geometrisk form utgör exempel på det matematiska begreppet grupp. I den här föreläsningen ska vi bekanta oss med permutationer, symmetrier och några grundläggande begrepp i gruppteori. T.ex. kommer vi att se att gruppen bestående av de 24 permutationerna av talen 1 till 4 i en abstrakt mening är ”samma” grupp som den som består av de 24 rotationssymmetrierna hos en kub.
Fö 2: torsdag 29 sept 2016 kl. 10–12, sal C4
Nils-Hassan Quttineh, MAI
Optimeringslära – matematik som löser svåra och komplexa beslutsproblem [MT]
Optimeringslära är en gren av matematiken som går ut på att dels modellera (matematiskt beskriva) svåra och komplexa beslutsproblem, och dels att faktiskt hitta den optimala lösningen till problemet. Ett klassiskt optimeringsproblem, som är väldigt lätt att förstå men riktigt svårt att lösa, är det så kallade Handelsresandeproblemet (Traveling Salesman Problem, TSP). Problemet går ut på att besöka $n$ på förhand givna städer, med kända avstånd mellan samtliga städer, på ett sådant sätt att alla städer besöks precis en gång (och man återvänder till den stad man börjar i) och med målsättning att minimera den totala resvägen. Vi kommer att prata om detta klassiska optimeringsproblem, och beskriva hur man löser det i praktiken, men också titta på andra typiska beslutsproblem. För att visa på hur otroligt praktiskt användbar (verklighetsnära) denna matematik är kommer vi också att beskriva pågående forskningsprojekt som bedrivs på avdelningen för Optimeringslära här på LiU.
Fö 3: torsdag 6 okt 2016 kl. 10–12, sal C4
Jana Björn, MAI
Kardinalitet och oändliga mängder [M]
Vi skall jämföra antalet element i oändliga mängder, definiera vad det betyder att två mängder har lika många element och gå igenom begreppen uppräknelig och överuppräknelig mängd. Föreläsningen kommer att innehålla både grundläggande teori (som tidigare ingick i en kurs i Diskret matematik) och exempel med tillämpningar.
Litteratur: A. Björn, B. O. Turesson, Diskret matematik (Kap. 10), kompendium, Linköping 2001.
Fö 4: torsdag 13 okt 2016 kl. 10–12, sal C1
Hans Lundmark, MAI
Några berömda 1800-talsmatematiker [H]
I denna föreläsning kommer vi att bekanta oss med ett urval av färgstarka matematiker verksamma på 1800-talet. Det blir lite blandat smått och gott om deras liv och deras matematiska upptäckter.
Fö 5: torsdag 10 nov 2016 kl. 10–12, sal C4
Magnus Herberthson, MAI
Introduktion till den speciella relativitetsteorin [T]
Einsteins speciella relativitetsteori från 1905 är ett specialfall av den allmänna relativitetsteorin (1915) på så sätt att att man bortser från rummets krökning. I och med det kan universum beskrivas med hjälp av ett vektorrum, det så kallade Minkowskirummet. Vi skall se hur det enda antagandet att ljushastigheten, c, är densamma för alla observatörer leder till begrepp som längdkontraktion och tidsdilatation.
- Litteratur: Principles of Cosmology and Gravitation av M. V. Berry, Introducing Einstein's Relativity av Ray d'Inverno, Rumtid – en introduktion till Einsteins relativitetsteori av Sören Holst.
Fö 6: torsdag 17 nov 2016 kl. 10–12, sal C2
Hans Lundmark, MAI
Visualisering av komplexvärda funktioner [M]
Det vanliga sättet att visualisera en funktion y=f(x), där x och y är reella variabler, är att rita dess graf. Men om man har en funktion där variablerna är komplexa, säg w=f(z), så får man problem. För att kunna rita grafen direkt skulle man ju behöva ett fyrdimensionellt koordinatsystem, med två axlar för z (realdel och imaginärdel) och två axlar för w. Jag ska berätta om några sätt att visualisera sådana funktioner, speciellt en metod som kallas domain coloring (färgläggning av definitionsmängden). Den ger upphov till färgbilder som inte bara är vackra utan dessutom avslöjar intressanta matematiska fenomen som man inte ser när man inskränker sig till reella variabler. Redan så enkla funktioner som polynom bjuder på överraskningar, och vi ska även titta på andra elementära funktioner, till exempel w=exp(z) och w=sin(z).
- Bilderna till föreläsningen (pdf-fil, 6.3M).
- Mer material på Hans Lundmarks hemsida.
- Kortfilmen Möbius Transformations Revealed på YouTube. Filmmakarna har även gjort en hemsida för filmen där man kan läsa mer och ladda ner en högupplöst version.
- Litteratur: TATA45 Komplex analys av Lars Alexandersson (utmärkt kompendium på svenska till kursen TATA45, säljs i Kårallen), Visual Complex Analysis av Tristan Needham, Visual Complex Functions: An Introduction with Phase Portraits av Elias Wegert, Complex Variables av Mark J. Ablowitz och Athanassios S. Fokas.
Fö 7: torsdag 24 nov 2016 kl. 10–12, sal C2
Erik Larsson, Kommunikationssystem, ISY
Minsta-kvadrat-problem i kommunikationssystem [T]
Den här föreläsningen kommer att ge inblick i tillämpningar av minsta-kvadrat-problem i kommunikationsmottagare. Vi kommer se exempel på både minsta-kvadrat-problem utan bivillkor och sådana med heltalsbivillkor. Vi kommer prata om varför dessa problem uppkommer och kort om utmaningarna med att lösa dem.
Förkunskaper: Grundläggande linjär algebra (vektorer, matriser, matrisinvers).
- Avdelningen Kommunikationssystem på ISY och Erik Larssons hemsida.
- MIMO Detection Methods: How They Work, en artikel av Erik Larsson som täcker vad föreläsningen behandlar och mer därtill.
Fö 8: torsdag 8 dec 2016 kl. 10–12, sal C2
Torkel Glad, Reglerteknik, ISY
Hur flygplan flyger: egenvärden och egenvektorer [T]
Dynamiska system, t.ex. flygplan, beskrivs av differentialekvationer. I idealiserade fall är dessa linjära, och differentialekvationernas koefficienter kan "paketeras" i matriser. Det visar sig att egenvärdena och egenvektorerna till dessa matriser ger en god bild av beteendet. Detta är speciellt intressant om man inte är nöjd med beteendet utan vill förbättra det med ett styrsystem. Detta är i hög grad aktuellt för flygplan och numera bilar, men också för elektroniken i CD-spelare, mobiltelefoner och andra apparater. Ofta kan man se inverkan av ett styrsystem som att det flyttar egenvärden till önskade positioner i det komplexa talplanet. Detta ger systematiska sätt att konstruera sådana system.
Fö 9: torsdag 9 feb 2017 kl. 10–12, sal C2
Hans Lundmark, MAI
Jongleringsteori [M]
Vi roar oss med att utforska den matematiska teoring för jonglering!
- Bilderna från föreläsningen (pdf).
- Artikel om siteswap-notation på engelska Wikipedia.
- Siteswap.org har många länkar till ytterligare information.
- Förenklade tillståndsdiagram för siteswap (från Hans Lundmarks hemsida).
- Det finns många program för att simulera siteswaps. Här är ett som körs direkt i webbläsaren: JsJuggle.
- Hur blir det om man tillåter negativa kast i siteswaps? Svar: Bollar som kastas bakåt i tiden kan tolkas som antibollar som kastas framåt i tiden! High Energy Juggling av Andrew Conway ger en humoristisk förklaring av detta.
- Och bara som ett exempel på att detta inte enbart är lek, här är den antagligen mest avancerade matematiska tillämpningen av jongleringsrelaterade saker hittills: Positroid varieties: juggling and geometry av Allen Knutson, Thomas Lam och and David E. Speyer. (Forskningsartikel inom algebraisk geometri/kombinatorik.)
Fö 10: torsdag 23 feb 2017 kl. 10–12, sal C2
Hans Lundmark, MAI
Reella och inte fullt så reella tal [MH]
Vad man lägger i begreppet tal har varierat genom historiens gång. Positiva rationella tal har varit rätt okontroversiella sedan urminnes tider, men irrationella och/eller negativa tal betraktades länge med skepsis, för att inte tala om de mystiska ”imaginära” talen. I differentialkalkylens barndom (slutet av 1600-talet) räknade man med ”infinitesimaler”, alltså tal som var mindre än varje ”vanligt” positivt tal, men ändå på något sätt större än noll. Svårigheten att förklara exakt vad dessa oändligt små tal var för något ledde till att man under 1800-talet gradvis kom att föredra att formulera analysens grunder med hjälp av ”epsilon och delta”-resonemang istället, som t.ex. i den definition av begreppet gränsvärde som används i analyskurserna än idag. Man håller sig då alltså inom det reella talsystemet, som innefattar irrationella tal, men inga oändligt små infinitesimaler, och heller inga oändligt stora tal. Märkligt nog dröjde det dock ända till långt in på 1800-talet innan Cantor och Dedekind var för sig föreslog precisa formuleringar av exakt vad man ska mena med begreppet ”reellt tal”. Denna föreläsning börjar med lite historik, och därefter ska vi se på hur man kan tänkas göra för att konstruera nya talsystem givet gamla, och speciellt hur man definierar de reella talen utifrån de rationella. Vi kommer då förhoppningsvis att kunna reda ut evighetsdebattfrågan om huruvida 0,999999… och 1 är två olika tal eller bara två olika sätt att skriva talet 1, och på slutet kanske vi hinner med en snabbtitt på moderna påfund som de hyperreella talen och de surrella talen, två talsystem som på varsitt sätt utökar de reella talen till att även innefatta oändligt små och oändligt stora tal. (De surrella talen generaliserar Dedekinds idé att definiera nya slags tal som snitt, dvs. par av mängder av tal, medan de hyperreella talen bygger på Cantors idé att definiera nya slags tal som ekvivalensklasser av talföljder.)
- Bilderna från föreläsningen (pdf).
- En trevlig bok som tar upp mycket av det som behandlas på föreläsningen är Which Numbers are Real? av Michael Henle (som man kan läsa online via universitetsbiblioteket). En annat lästips är The Real Numbers: An Introduction to Set Theory and Analysis [hylla 511 i biblioteket i hus D] av John Stillwell, som även har skrivit en bra introduktion till matematikens historia: Mathematics and Its History [hylla 510.9].
- På engelskspråkiga Wikipedia finns massor att läsa om de rella talen: Real number, Construction of the real numbers, 0.999…, och mycket annat.
- Om de surreella (surrealistiska?) talen på Wikipedia: Surreal number, och deras skapare John Conway, en färgstark personlighet och en extremt originell och kreativ tänkare. Standardverket om surrella tal är Conways bok On Numbers and Games [hylla 512.7]. En något märklig introduktion i form av en "mini-roman" är Surreal Numbers: How Two Ex-Students Turned on to Pure Mathematics and Found Total Happiness [hylla T] av Donald Knuth.
- Om de hyperreella talen på Wikipedia: Hyperreal number (inte världens mest lättlästa artikel tyvärr). För någonting läsvänligare, prova en introduktion skriven av J. G. Hermoso. En av vår tids mest framstående matematiker, Terence Tao, har skrivit en del om saken på sin blogg: Ultrafilters, nonstandard analysis, and epsilon management. Den som vill lära sig ämnet från grunden kan ta sig an den utmärkta boken Lectures on the Hyperreals: An Introduction to Nonstandard Analysis [hylla 515.8] av Robert Goldblatt. En grundläggande analyslärobok (fritt tillgänglig i PDF-format) som använder det hyperreella talsystemet är Elementary Calculus: An Infinitesimal Approach av H. Jerome Keisler.
- Föreläsningsanteckningar av Alexandre Kirillov (University of Pennsylvania), med liknande tema som denna föreläsning: What are numbers? (Part I), What are numbers? (Part II).
- Läsning för självplågare: Stora tråden om 0.999...=1 på Flashback Forum. (8912 inlägg senast jag kollade!)
Fö 11: torsdag 2 mars 2017 kl. 10–12, sal C2
Anders Björn, MAI
Serier, primtal och tegelstenar [M]
Vi ska börja med att titta på hur man ska stapla tegelstenar på varandra för att få ett så stort överhäng som möjligt. Därefter ska vi diskutera lite olika problem som har med konvergens av serier att göra. Bl.a. ska vi titta på serierna $$ \sum_{k=1}^{\infty} \frac{1}{k} \qquad\text{och}\qquad \sum \frac{1}{p} , $$ där den senare summan är över primtalen $p=2,3,5,7,11,\ldots$. Vi ska inte bara nöja oss med att avgöra om serierna konvergerar eller divergerar utan i det senare fallet också avgöra hur snabbt (långsamt) de divergerar. Därefter ska vi titta på några andra serier med viss anknytning till talteori, och också se hur primtal kan vara praktiskt användbara till annat än kryptering (primtalen är en fundamental del av de krypteringssystem som bl.a. används för säker överföring av information på internet).
Fö 12: torsdag 6 april 2017 kl. 10–12, sal C2
Jan Åslund, Fordonssystem, ISY
Modellbaserad diagnos [T]
Modellbaserad diagnos går ut på att upptäcka fel i ett tekniskt system. När ett fel upptäcks genereras en diagnos som t.ex. en servicetekniker kan använda för att avgöra vilka komponenter som behöver bytas ut. I analysen utgår vi ifrån en matematisk modell av systemet samt mätdata från sensorer för att kunna dra slutsatser om någon del av systemet inte fungerar som den förväntas göra. Jag kommer att berätta lite om vilka matematiska verktyg som vi använder och framförallt diagnosproblemets koppling till lösbarhet av överbestämda ekvationssystem.
Fö 13: torsdag 27 april 2017 kl. 10–12, sal C3
Hans Lundmark, MAI
Att multiplicera vektorer [MH]
I grundläggande kurser i linjär algebra behandlas skalärprodukt (eller inre produkt) $\mathbf{u} \cdot \mathbf{v}$ och kryssprodukt $\mathbf{u} \times \mathbf{v}$. Kryssprodukten är bara definierad i tre dimensioner, och en sak som många studenter brukar undra är om det finns någonting liknande i andra dimensioner.
I den här föreläsningen ska vi se att svaret är ja, om man släpper på kravet att en vektor gånger en vektor ska bli en vektor, och istället inför ett slags flerdimensionella geometriska storheter som kallas multivektorer. Då kan man definiera Grassmanns yttre produkt (även kallad kilprodukt eftersom den skrivs $\mathbf{u} \wedge \mathbf{v}$), som är sådan att en vektor gånger en vektor blir en bivektor, produkten av tre vektorer blir en trivektor, och så vidare. Den yttre produkten representerar det underrum som de multiplicerade vektorerna spänner upp, och den blir noll om och endast om faktorerna är linjärt beroende. En trevlig sak är att begreppet determinant, som kan synas mystiskt när man först stöter på det, uppkommer på ett väldigt naturligt sätt i detta sammanhang.
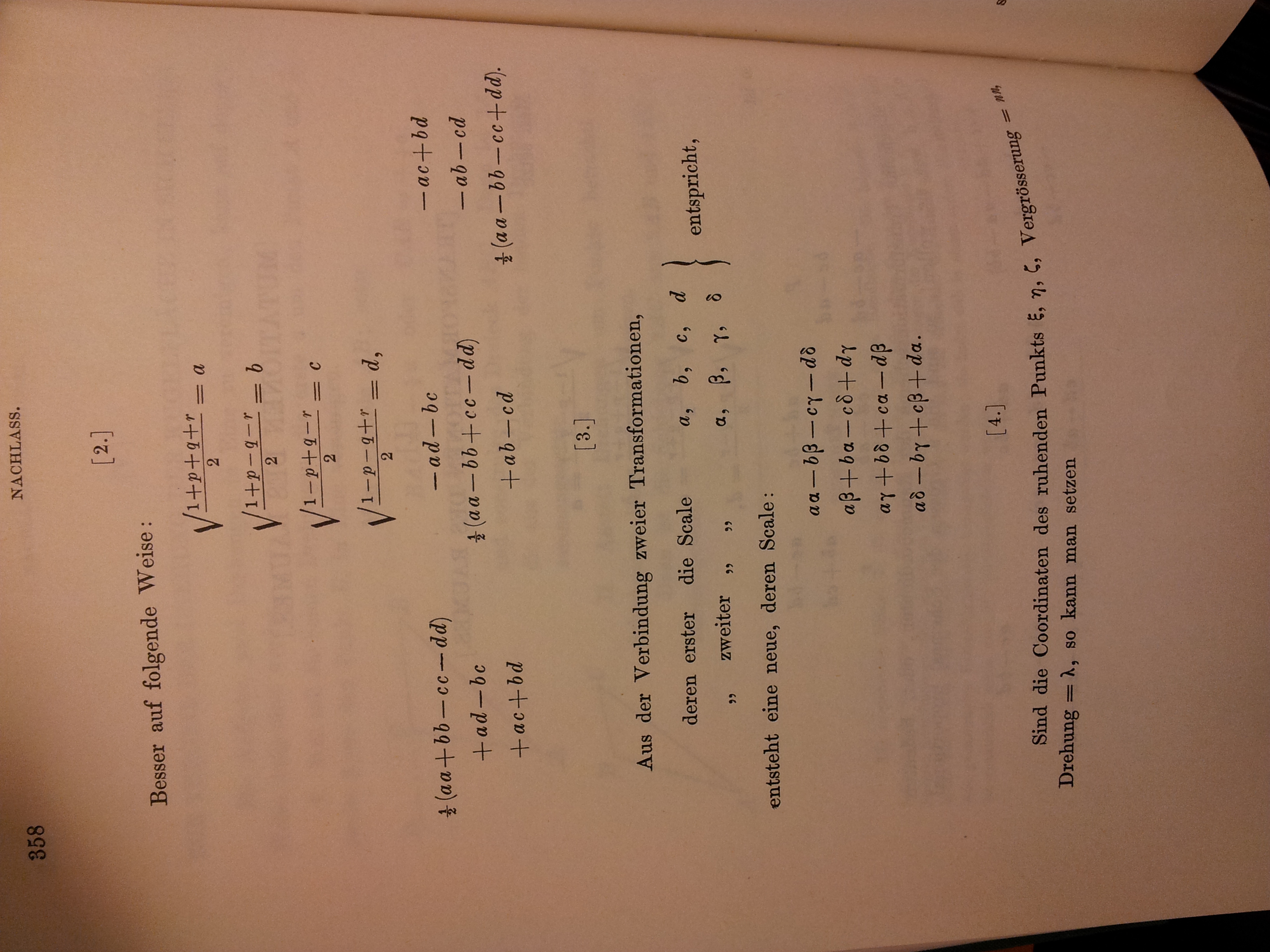
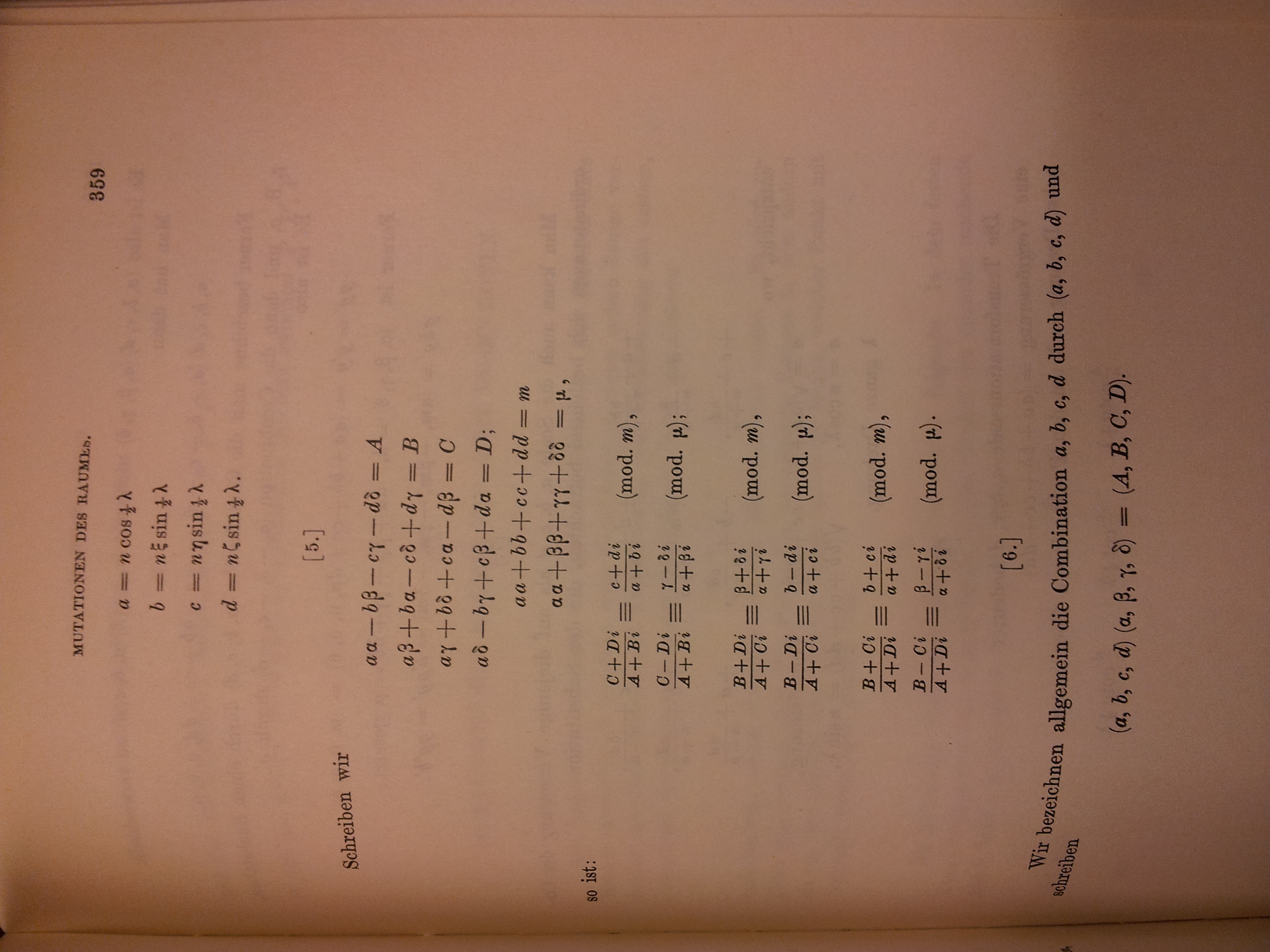
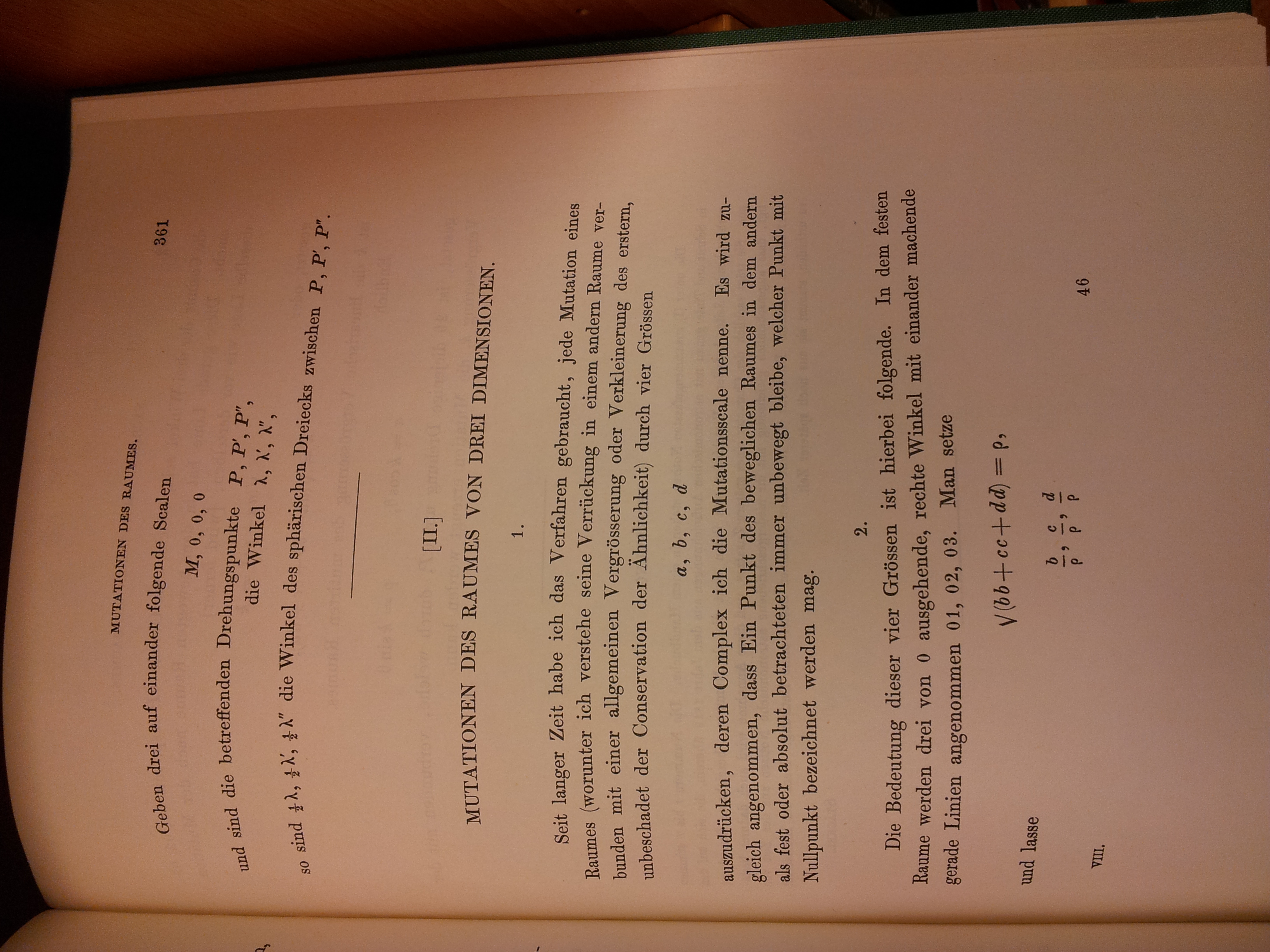
Ett annat tankespår som vi ska följa går via de komplexa talen $a+bi$ och Hamiltons kvaternioner $a+bi+cj+dk$ till Cliffordprodukten (ibland kallad den geometriska produkten) som förenar de inre och yttre produkterna i en enda produkt $\mathbf{u} \mathbf{v} = \mathbf{u} \cdot \mathbf{v} + \mathbf{u} \wedge \mathbf{v}$. Detta sätt att multiplicera (multi)vektorer kan bl.a. användas för att räkna på vridningar och projektioner i godtycklig dimension. Cliffordprodukten används i många sammanhang i modern matematisk fysik, t.ex. i kvantmekaniken i form av Pauli- och Diracmatriser, och även i den speciella relativitetsteorin där Lorentztransformationer kan ses som "vridningar" i den fyrdimensionella rumtiden.
- Bilderna från föreläsningen (pdf-fil).
- "Kvaternionmultiplikation" från C. F. Gauss' samlade verk, åttonde bandet (avfotograferat från exemplaret i Linköpings universitetsbibliotek): titelsida, s. 357, s. 358, s. 359, s. 360, s. 361.
- Utdrag ur brev från Hamilton där han beskriver upptäckten av kvaternionerna.
- Wilsons bok Vector Analysis: A Text-book for the Use of Students of Mathematics and Physics från 1901, som populariserade Gibbs' vektornotation (bl.a. skalärprodukt och kryssprodukt).
- The Octonions av den kände matematiske fysikern John Baez. Allt du någonsin velat veta om oktonioner!
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Fö 14: torsdag 4 maj 2017 kl. 10–12, sal C3
Joakim Arnlind, MAI
Kvantgravitation och icke-kommutativ geometri [MT]
En av de stora utmaningarna inom teoretisk fysik under 1900-talet har varit att försöka konstruera en teori som förenar kvantfysiken med den allmänna relativitetsteorin. Kvantfysiken beskriver hur de allra minsta partiklarna växelverkar medan relativitetsteorin beskriver gravitationskraften och hur den påverkar rummet och tiden. I de allra flesta fall så räcker det med att använda endast en av teorierna för att beskriva ett fysikaliskt system. Till exempel så har gravitationskraften en ytterst liten inverkan på två protoner som kollliderar, medan kvantmekanik knappast är relevant då man vill beskriva hur planeterna rör sig i solsystemet. Det finns dock tillfällen då man inte kan bortse från någon av krafterna, till exempel vid mycket små avstånd eller vid mycket höga energier. En teori som tar hänsyn till både kvantfysik och gravitation skulle kunna benämnas "kvantgravitation", och än så länge finns det inte någon sådan som är allmänt accepterad av forskarna, även om det finns kandidater, som till exempel strängteori.
Vad de flesta forskare dock är ense om är att vi radikalt måste ändra vår syn på rummets struktur på mycket små längdskalor. Vi blir tvugna att byta ut vår vanliga uppfattning om geometri mot icke-kommutativ geometri. Icke-kommutativ geometri är ett område inom matematiken som försöker förstå geometriska begrepp såsom längd, krökning och derivator i ett sammanhang där koordinaterna som beskriver rummet inte längre kommuterar; dvs då x*y inte längre ger samma resultat som y*x. Naturligtvis kan koordinaterna inte längre vara tal (då det alltid gäller att x*y=y*x), utan snarare operatorer, som till exempel matriser, för vilka vi vet att X*Y inte alltid är lika med Y*X.
I denna utblick ska jag försöka ge en inblick i icke-kommutativ geometri och hur detta matematikområde är kopplat till teoretisk fysik.
Fö 15: torsdag 11 maj 2017 kl. 10–12, sal C3
Hans Lundmark, MAI
Några berömda 1900-talsmatematiker [H]
Denna föreläsning bjuder på en kavalkad av 1900-talsverksamma matematiker, vars liv och verk vi ska försöka lära känna lite: Hilbert, Noether, Gödel, Turing, Ramanujan, Erdős, Grothendieck, Conway, m.fl.
- Bilderna från föreläsningen (pdf-fil).
- Hilberts radiotal från 1930. Även här, med transkription och engelsk översättning.
- Filmsnuttar med bl.a. Hilbert som skottar snö. Filmat i Göttingen på 1920-talet av Richard Courant, som också är berättarrösten. Hämtat från Göttingen and New York: Reflections of a Life in Mathematics, en dokumentärfilm från 1966 om Courant (42 minuter).
- Hilberts samlade verk (Gesammelte Abhandlungen) i digitaliserad form: volym 1, volym 2, volym 3.
- Artikeln The Indian Mathematician Ramanujan (Amer. Math. Monthly, 1937), där G. H. Hardy återger sina minnen av Ramanujan.
- Ramanujan: Letters from an Indian Clerk. Dokumentärfilm från 1987 (52 minuter).
- N is a Number: A Portrait of Paul Erdős. Dokumentärfilm från 1993 (57 minuter).
- Game of Life: online-simulator och implementation av digitalur.
Fö 16: torsdag 18 maj 2017 kl. 10–12, sal C2
Jesper Thorén, MAI
Felrättande koder [T]
Vid all slags överföring och lagring av information finns det risk för att fel uppkommer. För att upptäcka och rätta sådana fel kan man tillföra den informationsbärande texten en viss redundans, t.ex. i form av kontrollsiffror. Det är en angelägen uppgift att försöka finna effektiva metoder för att spara tid (och lagringsplats) för felbehandling, och detta är syftet med teorin för felrättande koder. Vi kommer bl.a. att konstruera koden som användes av rymdsonden Mariner 9 för att sända bilder av planeten Mars tillbaka till jorden.
Senast uppdaterad: 2019-11-29